こんにちは! FLLコースを担当している細井です。
今回は、ロボコンなどの大会に出場するときに便利なアタッチメント、”動く床” を紹介します。まずは、実際に動く床を使ってミッションをクリアしてる映像を見てみましょう。
このように動く床は、上に載せたものを目標の場所まで運ぶ(落とす)ことができます。
動く床の基本的な仕組み
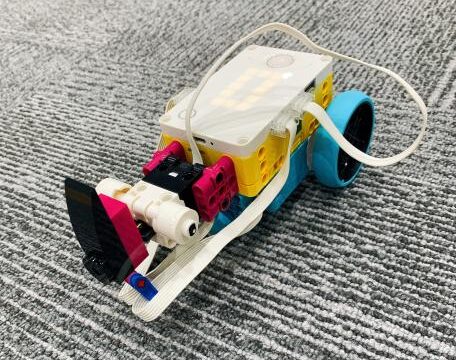
まずは基本的な仕組みについて説明します。動く床は、ベースロボットにつける枠部分(固定されている)と、物を載せる床(スライドする)、の2つで構成されています。床部分には、つめがついており、これがミッションモデルにあたることで床がスライドし、上に載っているものが下に落ちるという仕組みです。

実際に作ってみる
では、実際に枠と床の部分を作り、プログラムを作成してみましょう。
枠部分
1. 水色の枠にH型の部品を4つつけ、ビスを差します。

2. 灰色のH型の部分に白いリフトアーム(15p)と、灰色の部品(2p)をつけたら完成です。

床部分
1. 最初につめの部分を作ります。黄色い2-4のL字部品に、向き変換できる部 品とシャフト(長さはつめにあたる物体の高さによって変えてください)をつけます。

2. 写真のように2つのリフトアーム(15pと11p)とをつけます

3. 先ほどのリフトアームに、黒のリフトアーム(15p)を7つつけ、先ほどと同じようにつめとリフトアームをつけたら完成です。

プログラム
プログラムはとても簡単に作ることができます。下のようにロボットを前に移動させた後、後ろに移動させるだけです。とてもシンプルなのでプログラムを初めて触る人にも、簡単に作ることができます!

特徴・改造アイデア
【注意点】
落ちる床をベースロボットにつける際には、スライド後に床部分がロボット本体に当たらないよう、アタッチメントをつける位置に注意しましょう。

【動く床を使って他のミッションもやってみたいあなたに】
枠部分に突起をつけることによって、様々なサイズのオブジェクトを運ぶことができます。今回のアタッチメントでは、右下のようなシャフトを枠の穴に差すことで、4段階の調節が可能です。

最初にお見せした動画では②の位置にシャフトを入れていますが、今回は、③の位置に入れてみました。
このように、突起(今回はシャフト)を入れることで、スムーズに物体を落とせたり、様々な大きさのものにもすぐに対応できたりと、とても便利です!皆さんもぜひ試してみてください。
まとめ
動く床には、3つのメリットがあります。
①モーターを使わないでも、ミッションをクリアできる
②プログラムが簡単・単純な動きだから失敗しづらい
③様々なミッションモデル、オブジェクトにも対応できる
さて、今回のアタッチメントはいかがだったでしょうか。ロボットの大会では、このように物の運搬をするミッションが毎年あります。ぜひ参考にしていただけたら嬉しいです♪
今後もアタッチメントの作り方や作る際のコツを紹介していくので、ぜひご覧ください!